Projects
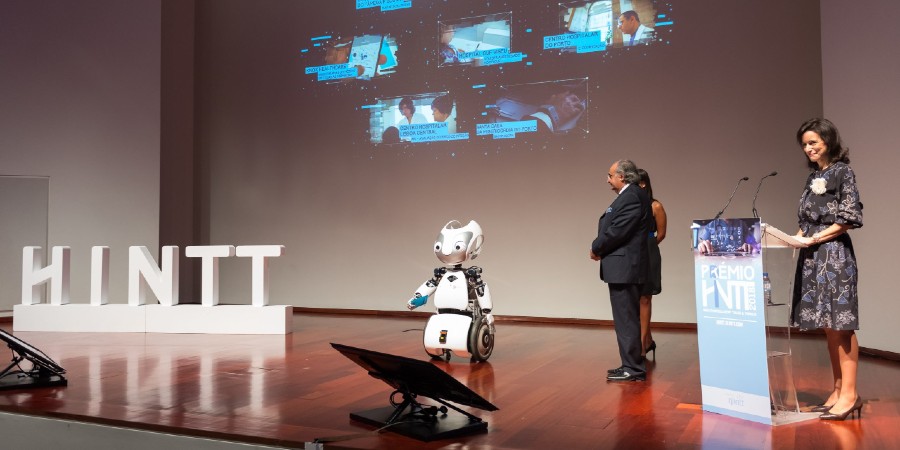
Vizzy Robot Handshake
https://github.com/vislab-tecnico-lisboa/vizzy
Created RVIZ plugins and operated the Vizzy Robot for handshaking and handover of the envelope with the GLINTT HINTT health award recipients. Operated Vizzy while handshaking dignitaries such as the President of the European Parliament Antonio Tajani.
(c++, ROS, RVIZ)
SMPL domain Interactive Visualizer
https://github.com/carlos-cardoso/SmplDofApp
A simple web app to interactively explore the degrees of freedom of the SMPL model. Based on the visualization code from EasyMocap.
(Python, HTML)
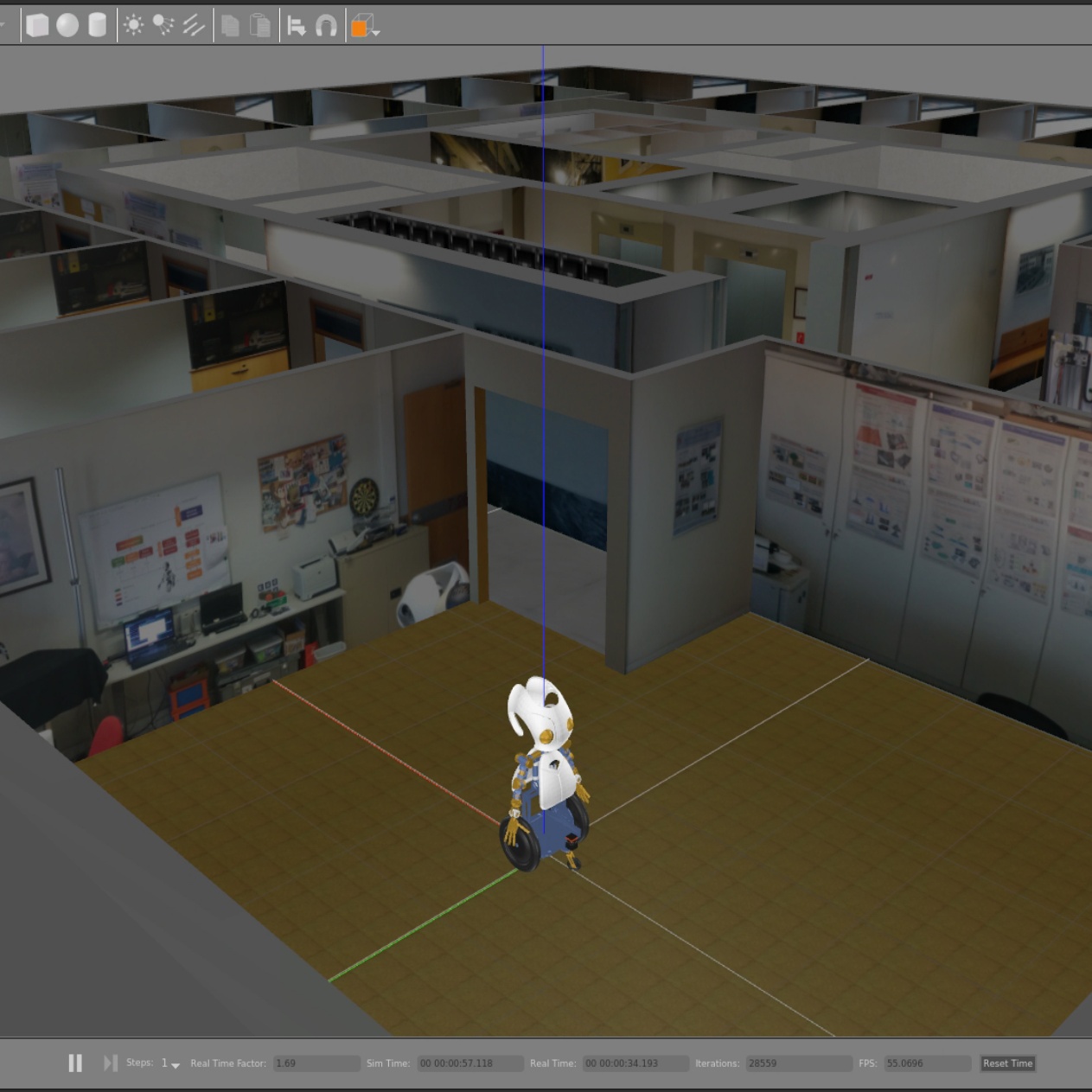
Vizzy Robot Simulator Docker Image
https://github.com/carlos-cardoso/vizzy-docker
Research robots usually have a complex software stack. The Vizzy humanoid robot uses both YARP and ROS and requires a long setup to run its simulation environment. This docker image allows researchers to skip setting up Vizzy and start experimenting on the simulated Vizzy in a fraction of the time.
(Dockerfiles)
Learning Robot Table Tennis
https://github.com/carlos-cardoso/robot-skills
My MSc project. A robot that learns how to hit a table tennis ball autonomously through exploration from a small set of initial demonstrations. I implemented the system in a simulated environment and on a real robotic platform, consisting of a BioRob manipulator + OptiTrack motion capture system that tracks the ball’s position.
(Julia, C++, Python, ROS)

Nix ROS Kinect V2
https://github.com/carlos-cardoso/kinect2-nix-ros-overlay
To capture RGBD data in Linux with Kinect V2 we can use libfreenect2. However, due to its dependencies, it is not trivial to install in recent Ubuntu releases. This repo forked from lopsided98/nix-ros-overlay contains scripts and the missing nix packages to run the libfreenect2 in any Linux system.
(nix, bash)
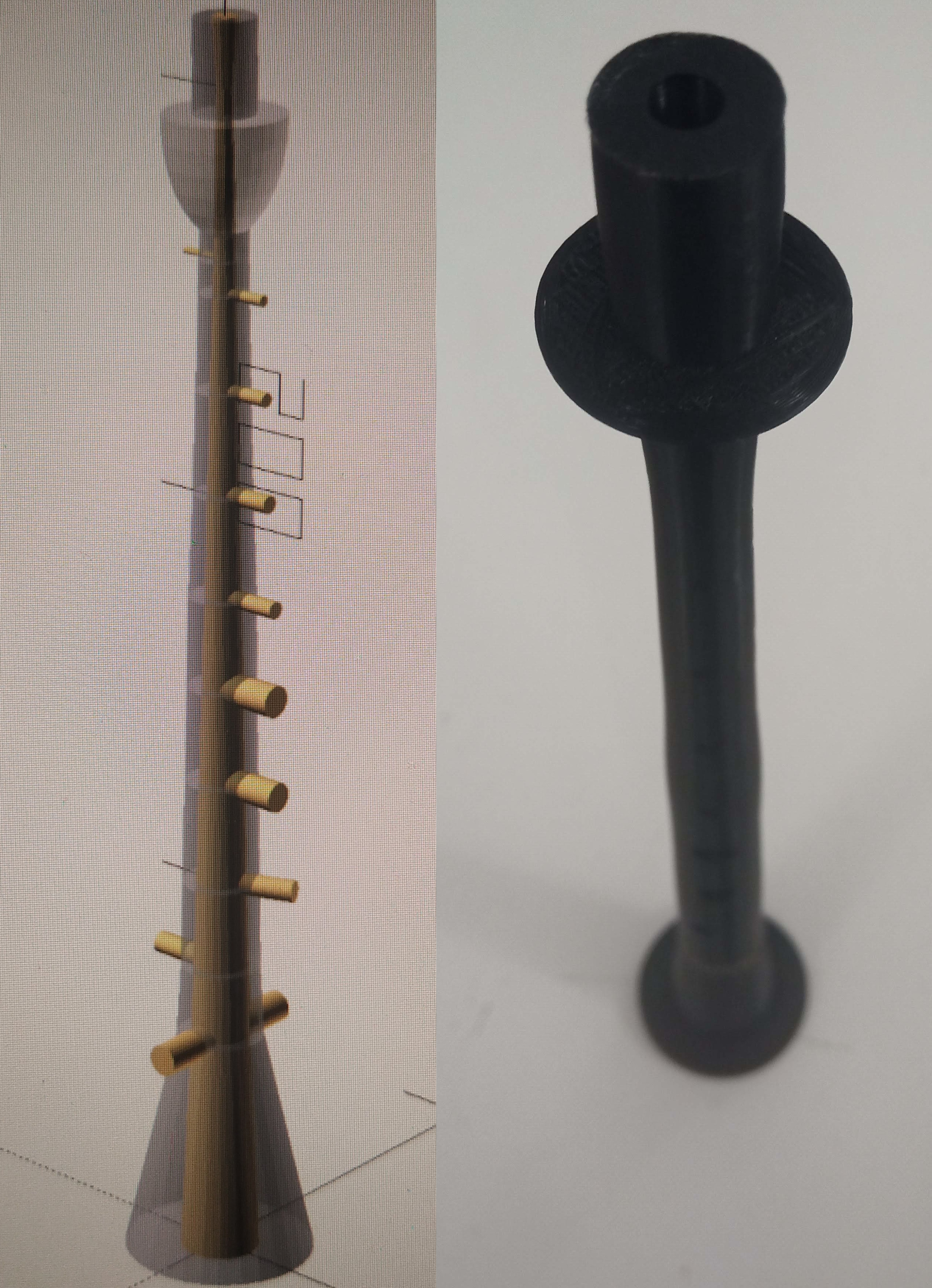
3D Printed Galician Bagpipe Chanter
https://github.com/carlos-cardoso/galician-chanter-scad
With the help of Professor Paulo Marinho (Sétima Legião, Anaquinhos da Terra, Gaiteiros de Lisboa) I modeled and printed a functional Galician Bagpipe Chanter (2019).
(OpenScad)

Teensy Electronic Bagpipe Chanter
https://github.com/carlos-cardoso/teensy-pipe
An electronic Galician bagpipe chanter based on a Teensy LC (Low Cost) board. Has configurable fingering and sends MIDI commands to a synthesizer through USB (tested on an iPad running Universal Piper).
(Embedded C++, python)
Physics Parameters Estimator
https://github.com/carlos-cardoso/RIPPE
In this work, we used a simulation environment (pybullet) to estimate the physical properties of objects (mass, friction) from observations of a robot interacting in the real world.
(python)
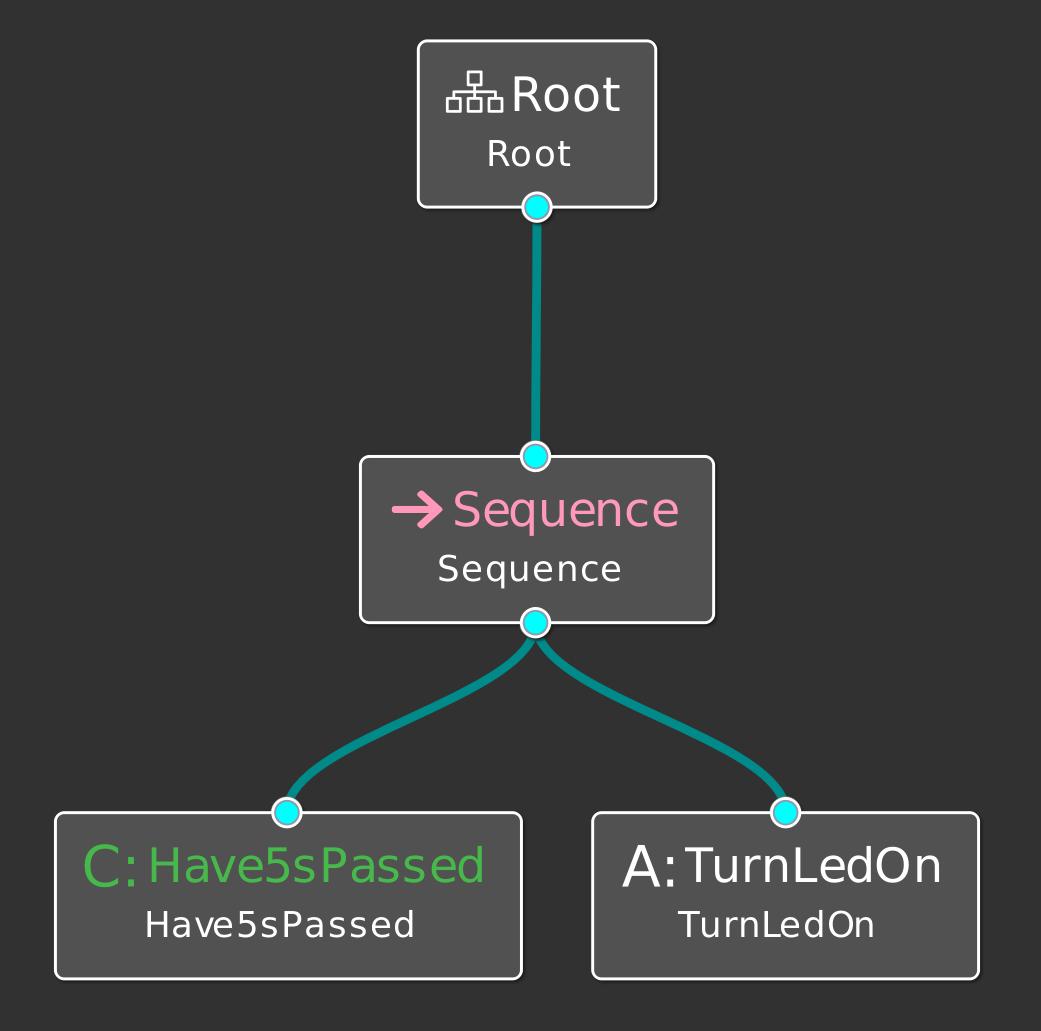
Embedded Behavior Trees
https://github.com/carlos-cardoso/arduino-behavior-tree
An example platformio project for the Arduino due. Uses the beehive header-only behavior trees library, and Groot for visual editing of trees.
(python, c++)
Special FX robot
ruadasgaivotas6.pt/events/capturing-you-fictional-politics-of-movement
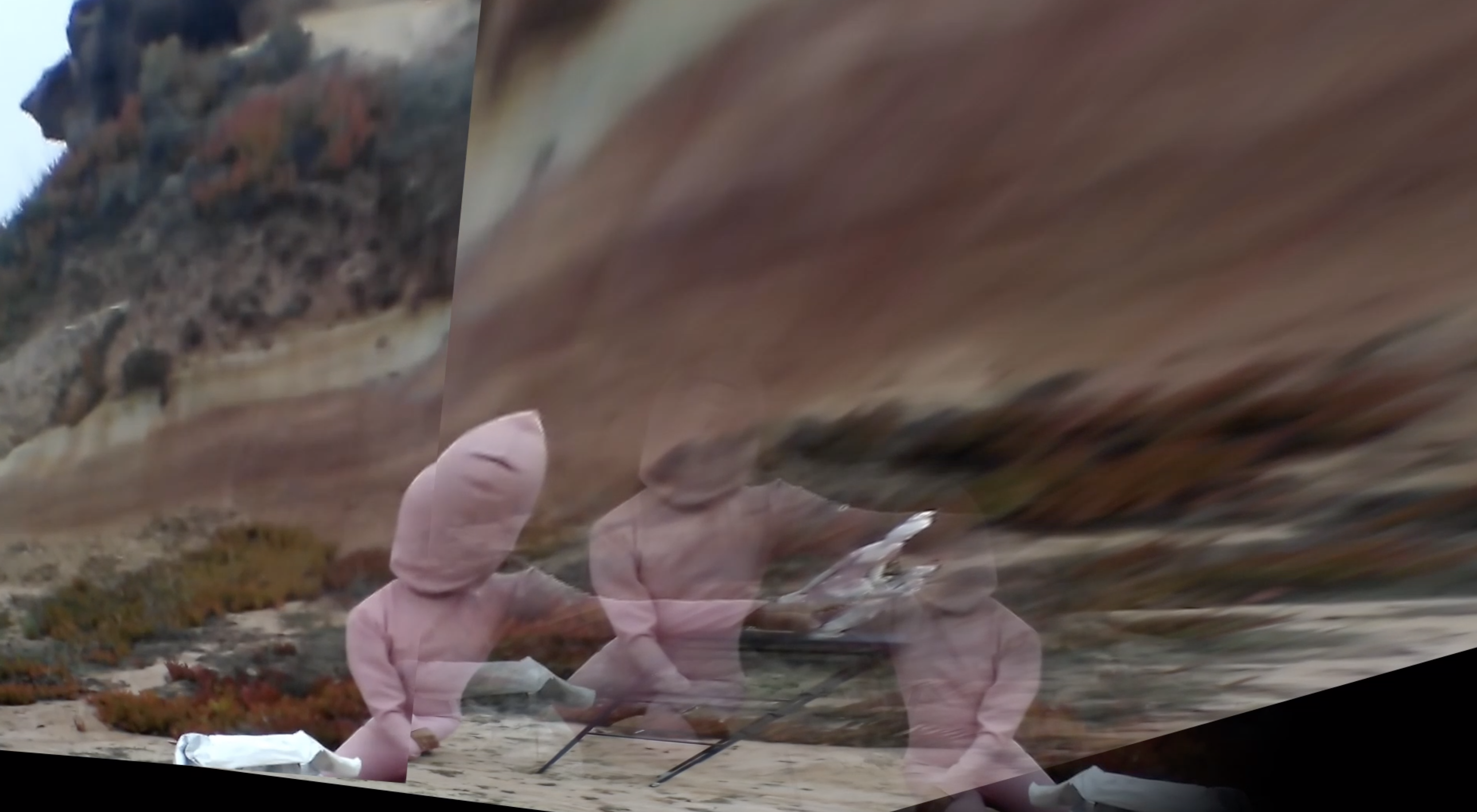
Live-coded a videogame and created a wifi-operated self-destructing robot for the performance “Capturing you | Fictional Politics of Movement” by Ana Libório at Rua das Gaivotas 6.
(bash, c++, Godot)

I've seen this face before (details)
https://brunojosesilva.com/LIMIT-OF-DISAPPEARANCE
We find a clean white frame with a small abstract illustration. When we approach the structure to see clearly, the image becomes blurry. However, if we can be patient and remain still, the picture slowly returns to focus.
This project is one of two art pieces created in cooperation with the artist Bruno José Silva. In display at the Project Room in Banco das Artes Galeria, Leiria (from April, 09 to May 29, 2022).
(Raspberry Pi, HD LCD, Camera, OpenCV, PyGame, Python)